








發表時間: 2025-09-02 10:51:42
作者: 石油化工設備維護與檢修網
瀏覽: 2389
汽輪機調速系統的核心功能是維持機組轉速穩定(確保發電頻率符合標準),并根據電網負荷需求精準調節進汽量,同時實現機組啟動、停機及事故工況下的安全保護。根據技術發展歷程,主流調速系統可分為機械液壓調速系統(傳統型)和數字電液調速系統(DEH) (現代主流型),二者在結構、原理上差異顯著,以下詳細介紹:
一、機械液壓調速系統(Mechanical-Hydraulic Governing System)
機械液壓調速系統是早期汽輪機的核心調速方式,依賴“機械感受+液壓放大”實現控制,結構簡單、可靠性高,多用于小型汽輪機(如工業拖動機組、老舊電站機組)。
1. 核心結構組成
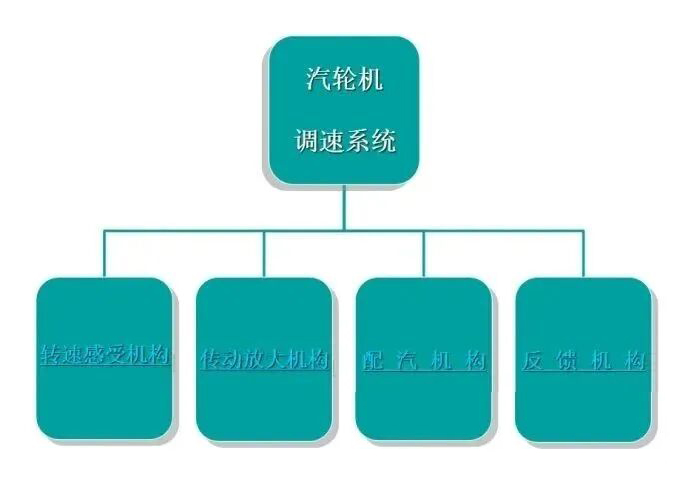
系統以“機械信號→液壓放大→執行動作”為核心鏈路,主要部件包括:
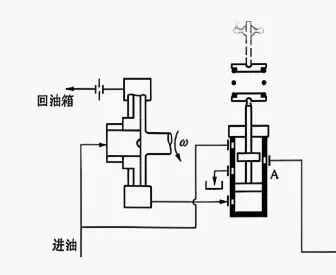
-1.1 轉速感受元件(敏感機構)核心作用是將“轉速變化”轉化為“機械位移”,最常用的是離心飛錘(或飛環)機構,安裝在汽輪機主軸(或增速器軸)上,隨主軸同步旋轉。
-飛錘:由2-4個可徑向滑動的重錘組成,重錘通過彈簧與主軸中心連接(彈簧力指向中心,離心力背離中心)。
-輔助部件:導向套(限制飛錘滑動方向)、連桿(傳遞飛錘位移)。
-1.2 中間放大元件(液壓放大器)
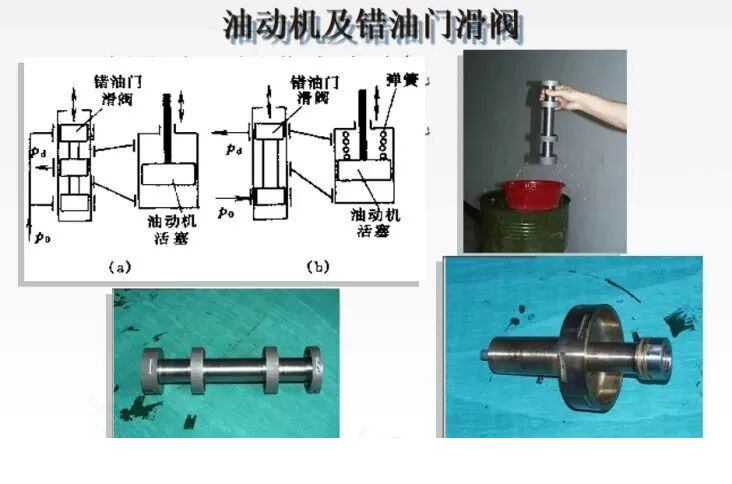
機械感受元件的位移量極小(通常僅幾毫米),無法直接驅動調節汽閥,需通過液壓放大將“小位移”轉化為“大推力”,核心部件是錯油門(滑閥) 和油動機(液壓缸) :
-錯油門:圓柱形滑閥,可沿軸向滑動,閥套上開有“進油口”“回油口”和“油動機接口”,通過滑動改變油口通斷狀態,控制高壓油(通常為1.5-2.5MPa壓力油)進入油動機的方向和油量。
-油動機:雙作用液壓缸(或單作用液壓缸+復位彈簧),活塞桿與調節汽閥連桿連接,高壓油推動活塞移動時,直接帶動汽閥開關。
-1.3 執行機構即調節汽閥(調門) ,通常為多個(如高壓主汽閥、高壓調節汽閥、中壓調節汽閥),安裝在汽輪機進汽管道上,通過閥門開度變化控制進入汽輪機的蒸汽流量,進而調節機組功率和轉速。
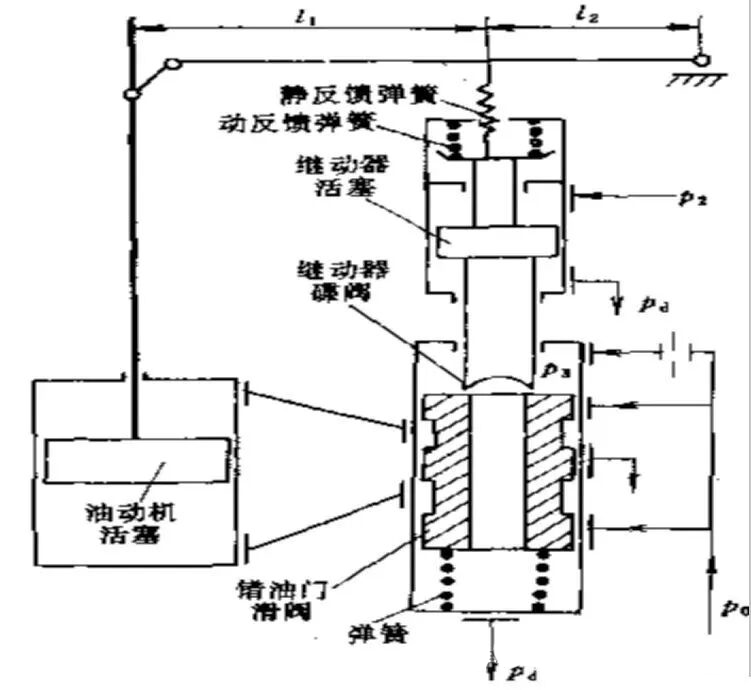
-1.4 反饋機構(閉環控制關鍵)為避免調節過度(轉速波動),需通過“反饋”將“執行機構的動作”傳回感受元件,形成閉環平衡,常用杠桿反饋或彈簧反饋:
-杠桿反饋:油動機活塞桿通過連桿與錯油門(或飛錘連桿)連接,油動機移動時,通過杠桿拉動錯油門反向滑動,抵消飛錘的初始位移,實現“調節→平衡”。
-彈簧反饋:在錯油門或油動機上設置反饋彈簧,油動機移動時壓縮/拉伸彈簧,產生反向力阻礙錯油門滑動,達到平衡。
-1.5 附加裝置
-同步器:手動或電動調節裝置,可改變飛錘彈簧的初始預緊力(或改變錯油門的零位),實現“人為設定轉速”(如機組啟動時升速、并網時調整轉速與電網同步)。
-超速保護裝置:如危急遮斷器(與飛錘聯動,轉速超限時觸發停機)、安全閥(防止液壓系統超壓)。
2. 工作原理(閉環控制過程)
基于“離心力與彈簧力平衡”和“液壓放大閉環”,具體過程如下:
1. 穩態平衡:機組額定轉速運行時,飛錘的離心力與彈簧的拉力(或壓力)平衡,飛錘處于固定徑向位置,錯油門處于“中間位”(進油口、回油口均關閉),油動機無動作,調節汽閥開度穩定,進汽量不變,轉速維持額定值。
2. 負荷變化→轉速波動:
-若電網負荷降低(需減少機組出力),汽輪機輸出功率大于外界負荷,轉速升高→飛錘離心力增大,克服彈簧力向外滑動→通過連桿帶動錯油門向上(或向下)滑動→打開錯油門的“油動機回油口”,油動機內高壓油排出→油動機活塞在復位彈簧(或另一側油壓)作用下移動,帶動調節汽閥關小→進汽量減少,機組出力降低→轉速逐漸回落。
-若電網負荷升高(需增加機組出力),則過程相反:轉速降低→飛錘向內滑動→錯油門打開“油動機進油口”→高壓油推動油動機活塞移動,調節汽閥開大→進汽量增加,轉速回升。
3. 反饋平衡→穩定轉速:油動機移動時,通過反饋杠桿(或彈簧)拉動錯油門反向滑動,逐漸關閉油口,直至錯油門回到中間位,油動機停止動作,調節汽閥穩定在新開度,轉速恢復至額定值,形成閉環控制。
二、數字電液調速系統(DEH,Digital Electric-Hydraulic Governing System)
DEH是20世紀80年代后發展的現代調速技術,結合“數字控制+電液執行”,具有精度高、響應快、功能豐富(如一次調頻、AGC協調控制)的特點,是大型火電機組、核電機組的標配。
1. 核心結構組成
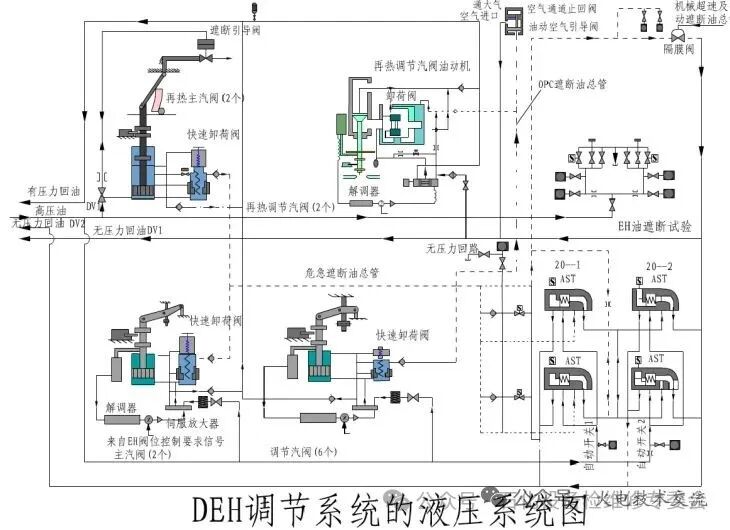
DEH系統分為電氣控制部分(“大腦”,負責信號處理與決策)和液壓執行部分(“手腳”,負責動作執行),二者通過電液轉換元件連接,結構如下:(1)電氣控制部分(核心決策層)
-1.1 轉速/功率信號采集單元替代機械飛錘,精準采集機組運行參數,核心元件:
-轉速傳感器:通常為3套磁阻式傳感器(或光電式傳感器),安裝在汽輪機主軸(或發電機軸)旁,將“轉速”轉化為“脈沖電信號”(轉速越高,脈沖頻率越高),實現冗余測量(避免單傳感器故障)。
-功率傳感器:通過電流互感器(CT)、電壓互感器(PT)采集發電機的電流、電壓信號,計算機組實際輸出功率,用于“負荷閉環控制”。
-壓力傳感器:采集主蒸汽壓力、再熱蒸汽壓力信號,避免進汽壓力過低時過度開閥導致機組不穩定。
-1.2 DEH控制器(數字核心)
相當于系統的“大腦”,通常基于PLC(可編程邏輯控制器)或DCS(分散控制系統)實現,核心功能是“信號對比、邏輯運算、指令輸出”:
-硬件:CPU模塊、輸入/輸出(I/O)模塊、通信模塊(與機組DCS、電網調度系統通信)、人機界面(HMI,用于操作人員設定參數、監控狀態)。
-軟件:固化控制邏輯(轉速控制邏輯、負荷控制邏輯、一次調頻邏輯、超速保護邏輯)、參數數據庫(額定轉速、最大負荷、閥門特性曲線等)。
-1.3 伺服放大器將DEH控制器輸出的“微弱電信號”(通常為±10V直流信號)放大為“可驅動電液伺服閥的電流信號”(通常為4-20mA),同時實現信號隔離(防止液壓系統干擾電氣系統)。
(2)液壓執行部分(動作執行層)
-2.1 電液伺服閥(電液轉換元件)連接電氣控制與液壓執行的關鍵部件,核心作用是將“電信號”轉化為“液壓油流量/方向信號”,結構為“電磁線圈+滑閥+噴嘴擋板”:
-原理:伺服放大器輸出的電流信號通入電磁線圈,產生電磁力推動滑閥(或噴嘴擋板)移動,改變高壓油(通常為10-16MPa高壓抗燃油)的流通路徑和流量,控制油動機的動作方向和速度。
-特點:響應速度快(毫秒級)、控制精度高(位移誤差小于0.1mm),但對油質要求極高(需定期過濾抗燃油,防止雜質卡澀)。
-2.2 油動機(液壓執行機構)與機械液壓系統的油動機功能類似,但推力更大、控制精度更高,通常為雙作用式液壓缸(無復位彈簧,兩側均通高壓油,通過伺服閥控制兩側油量差實現活塞移動),活塞桿直接連接調節汽閥的閥桿。
-2.3 位置反饋元件(LVDT)即“線性可變差動變壓器”,安裝在油動機上,一端固定,另一端與油動機活塞(或活塞桿)連接,核心作用是將“油動機活塞的位移”轉化為“電信號”,傳回DEH控制器,與控制器輸出的“目標位移指令”對比,形成閉環控制(避免閥門開度偏差)。
-2.4 液壓油系統為液壓執行部分提供高壓油,包括:-抗燃油箱(儲存高壓抗燃油,具有防火特性)、高壓油泵(提供10-16MPa壓力油)、油過濾器(過濾雜質,保護伺服閥)、蓄能器(穩定油壓,吸收壓力波動)。
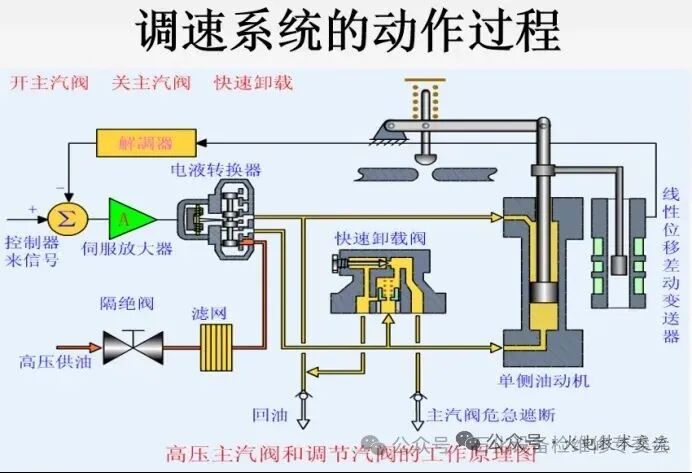
2. 工作原理(數字閉環控制過程)
DEH系統以“數字信號處理”為核心,實現更精準、靈活的控制,具體過程如下:
1. 參數采集:轉速傳感器、功率傳感器、壓力傳感器實時采集“實際轉速”“實際功率”“主汽壓力”等信號,轉化為電信號傳入DEH控制器。
2. 指令對比與運算:DEH控制器將“實際轉速”與“設定轉速”(如額定3000r/min)對比,或“實際功率”與“負荷指令”(電網調度下發)對比,通過內置控制邏輯(如PID調節算法)計算出“調節汽閥的目標開度指令”。
3. 電液轉換與放大:目標開度指令經伺服放大器放大為電流信號,傳入電液伺服閥→伺服閥根據電流信號調整滑閥位置,控制高壓油進入油動機的一側(或排出另一側油)→油動機活塞在油壓差作用下移動,帶動調節汽閥向“目標開度”方向動作。
4. 位置反饋與平衡:LVDT實時檢測油動機活塞的實際位移,將電信號傳回DEH控制器→控制器對比“目標開度”與“實際開度”,若有偏差則調整輸出信號,直至調節汽閥開度達到目標值,轉速(或功率)穩定,形成閉環控制。
5. 功能擴展:DEH還可實現“一次調頻”(電網頻率波動時自動調整負荷)、“AGC協調控制”(接收電網調度指令自動調整負荷)、“超速保護”(轉速超限時快速關閉調門)等功能,通過軟件邏輯即可實現,無需改動硬件。
三、兩種調速系統的核心差異對比
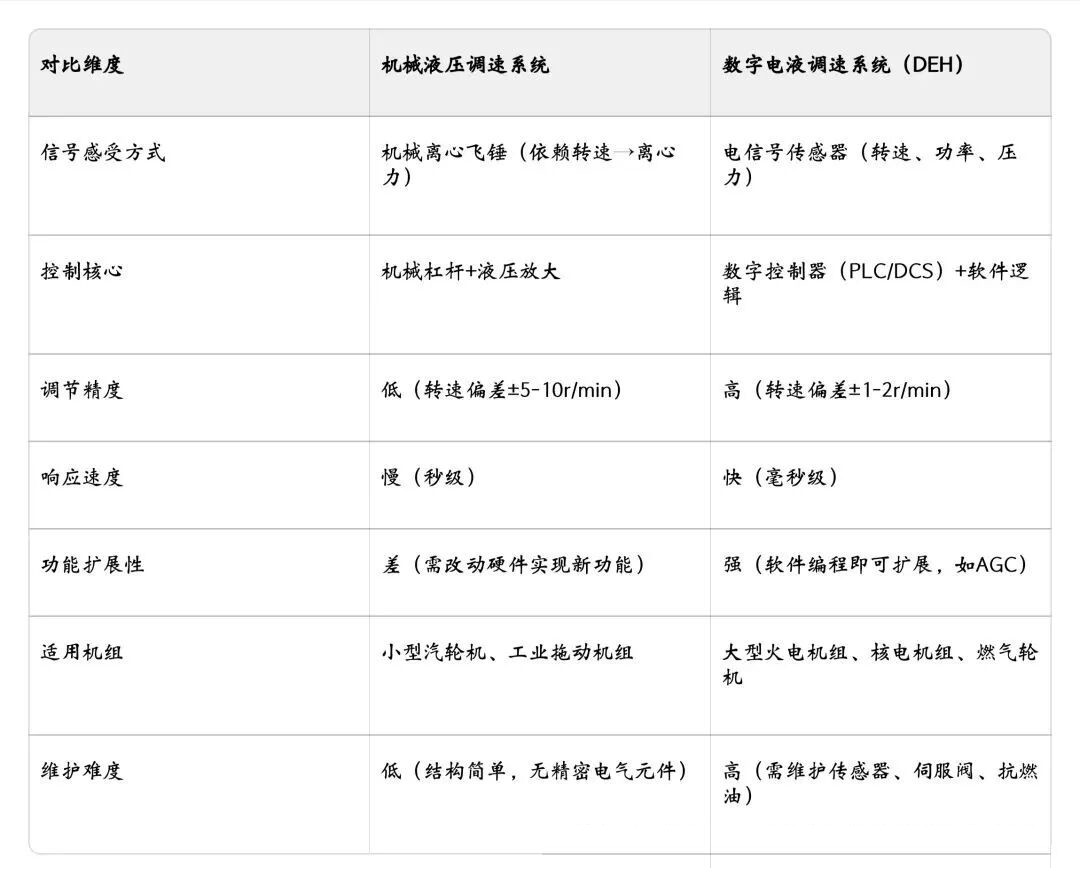
總結
機械液壓調速系統是“機械控制”的經典代表,結構可靠但精度有限;DEH系統通過“數字控制+電液執行”實現了調速技術的升級,滿足了大型機組對高精度、高靈活性的需求,已成為現代汽輪機調速系統的主流。實際應用中,需根據機組容量、運行場景(發電/拖動)及控制需求選擇合適的調速系統。
來源:電廠運行學習筆記


